Selected Publications
Keeping a good attitude: A quaternion-based orientation filter for IMUs and MARGs
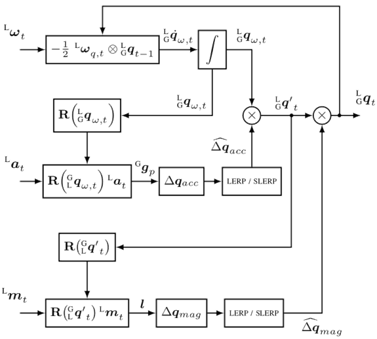
Orientation estimation using low cost sensors is an important task for Micro Aerial Vehicles (MAVs) in order to obtain a good feedback for the attitude controller. The challenges come from the low accuracy and noisy data of the MicroElectroMechanical System (MEMS) technology, which is the basis of modern, miniaturized inertial sensors. In this article, we describe a novel approach to obtain an estimation of the orientation in quaternion form from the observations of gravity and magnetic field. Our approach provides a quaternion estimation as the algebraic solution of a system from inertial/magnetic observations. We separate the problems of finding the “tilt” quaternion and the heading quaternion in two sub-parts of our system. This procedure is the key for avoiding the impact of the magnetic disturbances on the roll and pitch components of the orientation when the sensor is surrounded by unwanted magnetic flux. We demonstrate the validity of our method first analytically and then empirically using simulated data. We propose a novel complementary filter for MAVs that fuses together gyroscope data with accelerometer and magnetic field readings. The correction part of the filter is based on the method described above and works for both IMU (Inertial Measurement Unit) and MARG (Magnetic, Angular Rate, and Gravity) sensors. We evaluate the effectiveness of the filter and show that it significantly outperforms other common methods, using publicly available datasets with ground-truth data recorded during a real flight experiment of a micro quadrotor helicopter.
In MDPI, Sensors, 2015.
A linear Kalman filter for MARG orientation estimation using the algebraic quaternion algorithm
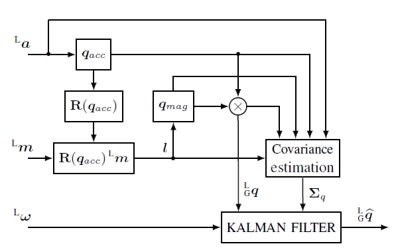
Real-time orientation estimation using low-cost inertial sensors is essential for all the applications where size and power consumption are critical constraints. Such applications include robotics, human motion analysis, and mobile devices. This paper presents a linear Kalman filter for magnetic angular rate and gravity sensors that processes angular rate, acceleration, and magnetic field data to obtain an estimation of the orientation in quaternion representation. Acceleration and magnetic field observations are preprocessed through a novel external algorithm, which computes the quaternion orientation as the composition of two algebraic quaternions. The decoupled nature of the two quaternions makes the roll and pitch components of the orientation immune to magnetic disturbances. The external algorithm reduces the complexity of the filter, making the measurement equations linear. Real-time implementation and the test results of the Kalman filter are presented and compared against a typical quaternion-based extended Kalman filter and a constant gain filter based on the gradient-descent algorithm.
In IEEE Transaction on Instrumentation and Measurement (TIM), 2016.

Autonomous quadrotor flight using onboard RGB-D Visual odometry
In this paper we present a navigation system for Micro Aerial Vehicles (MAV) based on
information provided by a visual odometry algorithm processing data from an RGB-D
camera. The visual odometry algorithm uses an uncertainty analysis of the depth information
to align newly observed features against a global sparse model of previously detected 3D
features. The visual odometry provides updates at roughly 30 Hz that is fused at 1 KHz with
the inertial sensor data through a Kalman Filter. The high-rate pose estimation is used as
feedback for the controller, enabling autonomous flight. We developed a 4DOF path planner
and implemented a real-time 3D SLAM where all the system runs on-board. The
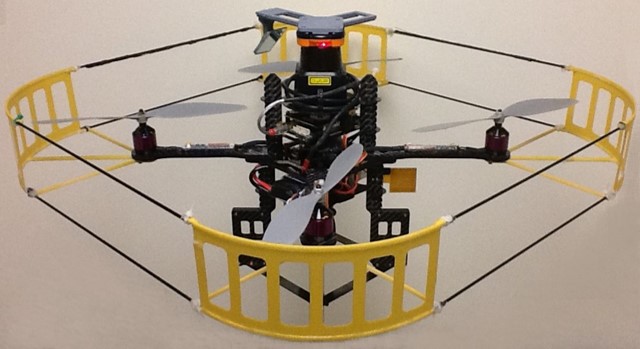
experimental results and live video demonstrates the autonomous flight and 3D SLAM
capabilities of the quadrotor with our system.
In IEEE International Conference on Robotics and Automation (ICRA), 2014.
An open source navigation system for micro aerial vehicles
This paper presents an open-source indoor navigation system for quadrotor micro aerial
vehicles (MAVs), implemented in the ROS framework. The system requires a minimal set of
sensors including a planar laser range-finder and an inertial measurement unit. We address
the issues of autonomous control, state estimation, path-planning, and teleoperation, and
provide interfaces that allow the system to seamlessly integrate with existing ROS navigation
tools for 2D SLAM and 3D mapping. All components run in real time onboard the MAV, with
state estimation and control operating at 1 kHz. A major focus in our work is modularity and
abstraction, allowing the system to be both flexible and hardware-independent. All the
software and hardware components which we have developed, as well as documentation
and test data, are available online.
In Autonomous Robots, 2013.